Alles automatisch
Die Kunst der Prozessintegration
Die Art, wie der Mischkopf über das Bauteil geführt wird, ist grundlegend für die Bauform der Misch- und Dosieranlage und hängt davon ab, wie Sie die Anlage in Ihren Fertigungsprozess einbinden möchten. Wir bieten dazu viele Möglichkeiten und noch mehr branchenspezifische Erfahrung. Ganz gleich ob halbautomatische Insel-Lösungen oder oder in Zusammenarbeit mit Ihrem Automatisierer vollautomatische Produktionsstraßen – wir haben es wahrscheinlich schon mal gebaut!
Maximal präzise
Bewegung des Mischkopfs über dem Bauteil mit einem 2- bzw. 3-Achs-Linearroboter LR-HD oder LR-HE plus, montiert auf einem Stahlprofilgrundgestell.
Die 2-Achs-Mischkopfverfahreinheit MKVE sorgt für die präzise Positionierung des Mischkopfs über dem Bauteil für die Auftragsdosierung.
Maximal kompakt
Bewegung des Mischkopfs mit einem 3-Achs-Linearroboter, montiert in einer Dosierzelle.
Maximal beweglich
Bewegung des Mischkopfs mit einem 6-Achs-Roboter – damit sind auch „Über-Kopf“-Applikationen möglich – eine entsprechende Materialwahl vorausgesetzt.
Maximal produktiv
Natürlich ist es auch möglich das Bauteil mit einem 6-Achs-Roboters zu greifen und unter einem fixierten Mischkopf hindurchzuführen, um auch komplexeste Geometrien abzubilden. Oder der Mischkopf wird von einem 6-Achs-Roboter über das Bauteil geführt.
Für die vollautomatische MOLD'N SEAL Inline-Fertigung werden Dosiermaschine und 6-Achs-Roboter mit einer Spritzgussanlage kombiniert.
Maximal einfach
Es bleibt Ihnen aber auch immer die Möglichkeit den Mischkopf per Hand zu führen – vorausgesetzt Sie haben genug Kraft. Aber da kann Ihnen ja dann wieder ein Roboter helfen…

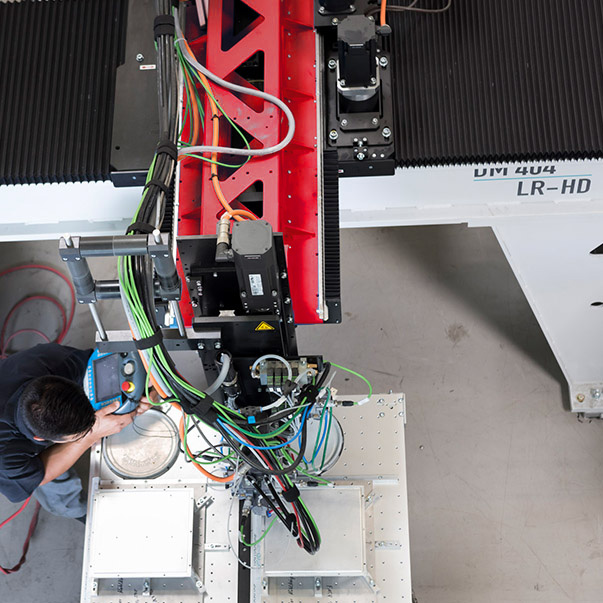
LR-HD
Linearroboter „High Dynamic“
Hochdynamischer 3-Achs-Linearroboter für die präzise Führung von Mischköpfen zum Auftragen polymerer Reaktionswerkstoffe. Der Zahnstangenantrieb mit hoher Steifigkeit und Beschleunigung ermöglicht dynamische Auftragsgeschwindigkeiten in Verbindung mit abrupten Richtungsänderungen und kleinen Radien.
Beschreibung
Hohe Beschleunigung, enge Radien und fließende Bewegungen über lange Konturen – kein Problem für die Linearroboter LR-HE plus und LR-HD. Die dynamischen 3-Achs-Linearroboter zeichnen sich durch hohe Steifigkeits- und Beschleunigungswerte über einen sehr großen Verfahrbereich aus. Für höchste Präzision hinsichtlich der Wiederholgenauigkeit ist der CNC-Linearroboter mit seiner geringen Abweichung von ±0,2 mm auf 2 m gegenüber dem 6-Achs-Roboter meist im Vorteil. Bevorzugte Einsatzbereiche sind Anwendungen mit hohen Auftragsgeschwindigkeiten in Verbindung mit schnellen Richtungsänderungen.
- Programmierung und Steuerung über Dialogeingabe in Menütechnik mit dem multifunktionalen Mobile Panel MP 2
- Ansteuerung über die IPC-Steuerung der Misch- und Dosieranlage
- Grundgestell in stabiler Stahlprofilträgerkonstruktion, geschweißt, mit schraubbarem Fußgestell, Nivellierfüßen und Vorbereitung für Bodenverankerung
- Führungssystem mit verschleißarmen Linearlagern und Spindelantrieb auf der Z-Achse
- Energieführungskette zur Aufnahme aller pneumatischen, elektrischen und hydraulischen Leitungen
| Max. Verfahrgeschwindigkeit: | 58 m/min | ||
|---|---|---|---|
| Max. Beschleunigung: | 10 m/s2 | ||
| Wiederholgenauigkeit: | +/- 0,08 mm | ||
| Nutzlast: | 20 kg | ||
| Elektrik: | Ausführung nach EN 60 204-1 | ||
| Lackierung - Grundgestell: | 2K-Strukturlack RAL 7035 (lichtgrau) / RAL 3020 (rot) | ||
| Elektrik: | Ausführung nach EN 60 204-1 | ||
| Netzanschluss: | 3 x 400 V, 50 Hz oder 60 Hz oder länderspezifische Netzanpassung | ||
| Nennleistung: | ca. 2 kVA | ||
| Durchschnittlicher Verbrauch: | ca. 1 kVA | ||
Varianten
- 1.000 x 1.000 x 300 mm (X/Y/Z)
- 1.500 x 1.000 x 300 mm (X/Y/Z)
- 2.000 x 1.000 x 300 mm (X/Y/Z)
- 2.500 x 1.000 x 300 mm (X/Y/Z)
- 3.000 x 1.000 x 300 mm (X/Y/Z)
- Optional Y-Achse 1.250 bzw. 1.500 mm
- Optional Z-Achse 500 mm
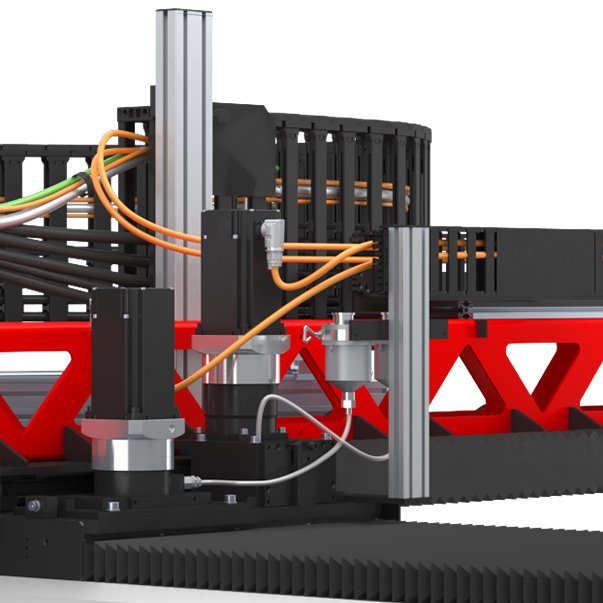
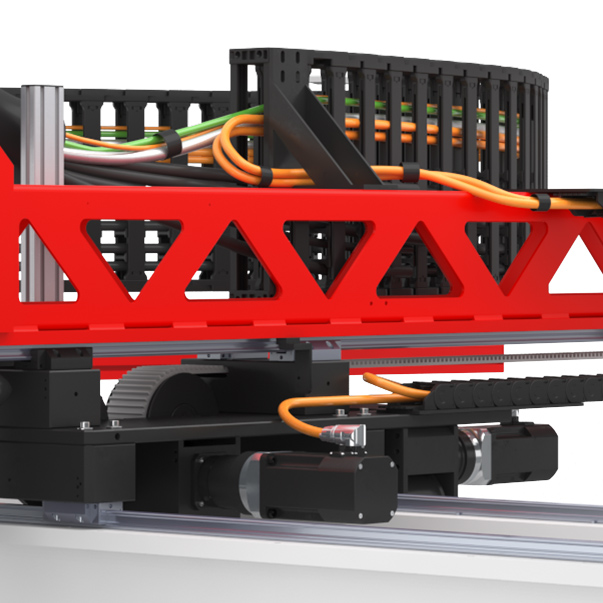
3-Achs-Linerarroboter LR-HD mit Zahnstangenantrieb

LR-HE plus
Linearroboter „High Efficiency“
Hocheffizienter 3-Achs-Linearroboter für die präzise Führung von Mischköpfen zum Auftragen polymerer Reaktionswerkstoffe. Der Omega Zahnriemenantrieb ermöglicht hohe Auftragsgeschwindigkeiten bei Bauteilen mit mittleren und großen Radien.
Beschreibung
Hohe Beschleunigung, enge Radien und fließende Bewegungen über lange Konturen – kein Problem für die Linearroboter LR-HE plus und LR-HD. Die dynamischen 3-Achs-Linearroboter zeichnen sich durch hohe Steifigkeits- und Beschleunigungswerte über einen sehr großen Verfahrbereich aus. Für höchste Präzision hinsichtlich der Wiederholgenauigkeit ist der CNC-Linearroboter mit seiner geringen Abweichung von ±0,2 mm auf 2 m gegenüber dem 6-Achs-Roboter meist im Vorteil. Bevorzugte Einsatzbereiche sind Anwendungen mit hohen Auftragsgeschwindigkeiten in Verbindung mit schnellen Richtungsänderungen.
- Programmierung und Steuerung über Dialogeingabe in Menütechnik mit dem multifunktionalen Mobile Panel MP 2
- Ansteuerung über die IPC-Steuerung der Misch- und Dosieranlage
- Grundgestell in stabiler Stahlprofilträgerkonstruktion, geschweißt, mit schraubbarem Fußgestell, Nivellierfüßen und Vorbereitung für Bodenverankerung
- Führungssystem mit verschleißarmen Linearlagern und Spindelantrieb auf der Z-Achse
- Energieführungskette zur Aufnahme aller pneumatischen, elektrischen und hydraulischen Leitungen
| Max. Verfahrgeschwindigkeit: | 35m/min | ||
|---|---|---|---|
| Max. Beschleunigung: | 5 m/s2 | ||
| Wiederholgenauigkeit: | +/- 0,1 mm | ||
| Nutzlast: | 20 kg | ||
| Elektrik: | Ausführung nach EN 60 204-1 | ||
| Lackierung - Grundgestell: | 2K-Strukturlack RAL 7035 (lichtgrau) / RAL 3020 (rot) | ||
| Elektrik: | Ausführung nach EN 60 204-1 | ||
| Netzanschluss: | 3 x 400 V, 50 Hz oder 60 Hz oder länderspezifische Netzanpassung | ||
| Nennleistung: | ca. 2 kVA | ||
| Durchschnittlicher Verbrauch: | ca. 1 kVA | ||
Varianten
- 1.000 x 1.000 x 300 mm (x/y/z)
- 1.500 x 1.000 x 300 mm (x/y/z)
- 2.000 x 1.000 x 300 mm (x/y/z)
- 2.500 x 1.000 x 300 mm (x/y/z)
- 3.000 x 1.000 x 300 mm (x/y/z)
- Optional Y-Achse 1.250 mm
- Optional Z-Achse 500 mm
- Weitere technische Daten oder Sondergrößen auf Anfrage